
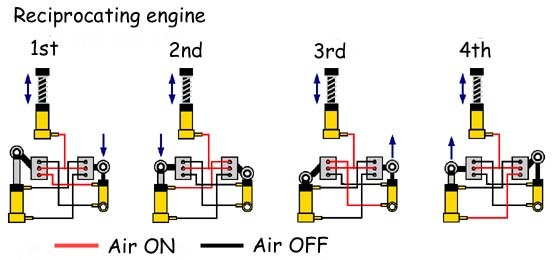
2組のピストンと三方弁を組み合わせることにより、往復機関ができます。この往復機関により、ポンプから圧縮空気を送り続けるだけで、ピストンが往復運動をします。この結果、尺取虫のような動きになります。

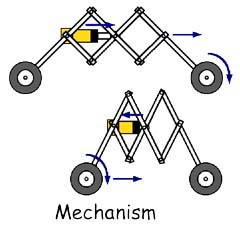
尺取虫ロボットです。
ピストンとリンク機構により全体が伸縮します。
車輪は、進行方向しか回転しないワンウェイクラッチになっているため、全体の伸縮だけで前進します。
2組のピストンと三方弁を組み合わせることにより、往復機関ができます。この往復機関により、ポンプから圧縮空気を送り続けるだけで、ピストンが往復運動をします。この結果、尺取虫のような動きになります。



Ryoichi Takahashi