6足ロボットです。
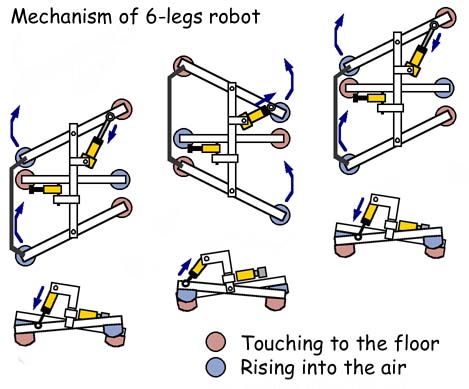
6本の足のうち、床に接しているのは3本です。残りの3本の足は宙に浮きながら前へ移動します。この動作を交互に行うことで、前進します。
空気ピストンは2個使います。1つ目のピストンは、宙に浮いた足を前に動かします。あと一つのピストンは、床に接する足を交代させます。
Ryoichi Takahashi